A WAAS egész pontosan úgy működik, hogy a földi állomások veszik a holdak jeleit, korrekciót számolnak, és a korrigált adatokat elküldik a WAAS holdak számára. A WAAS-műholdak a pontosított adatokat sugározzák a felhasználók vevői felé. Ennek a rendszernek is három szegmense van, úgymint űrszegmens, földi szegmens és felhasználói szegmens.
Vizsgáljuk először az űrszegmenst, melyet kettő geoszinkron pályán lévő szatellit alkot. Az egyik az Anik F1R vagy Telesat, ami a nyugati hosszúság 107,3° mentén kapott helyet. A másik a Galaxy 15 vagy PanAmSat, a nyugati hosszúság 133° mentén található. Frekvenciájuk a Navstar holdak L1-es sávjának megfelelő.
A földi szegmenst 38 földi követőállomás, kettő vezérlőállomás, négy betöltőállomás és két operációs irányító központ alkotja. A követőállomások gyűjtik össze a GPS-holdak adatait, majd továbbküldik a vezérlőállomásokhoz, amelyek feldolgozzák az adatokat, és a differenciális korrekciókat továbbítják a betöltőállomásokhoz. A korrekciókat pedig a betöltőállomások továbbítják a WAAS-műholdakhoz. A WAAS holdak pedig ezeket az adatokat sugározzák az L1-es sávban a felhasználói szegmens felé.
A következő rendszer is ismerős lehet az olvasók nagy részének, ez az EGNOS.
Az EGNOS az Európai Unió első navigációs műholdprojektje. Közösen működteti az Európai Unió (EU), az Európai Űrügynökség (ESA) és az Európai Polgári Repülésügyi Szervezet (EUROCONTROL). Működési elve megegyezik a WAAS-nál ismertetettel. Annyival több ez a rendszer, hogy nem csak a Navstar holdak jelét veszi és korrigálja, hanem a GLONASS, Galileo és a Compass holdak jelét is. Célja azonos a WAAS-éval: pontosítani a navigációs holdak jeleit. Ezt a célt el is éri, mert az átlagosan 10–20 méteres horizontális pontosságot 1,5 méteresre javítja.
| 2006. január 19-én 12-13 óra között mért horizontális
pontosság EGNOS korrekció nélkül (BME) | 2006. január 19-én 12-13 óra között mért horizontális
pontosság EGNOS korrekcióval (BME) |
* A képek forrása: Az EGNOS
tesztelése Takács Bence egyetemi adjunktus előadása (.ppt) ~
2006. február http://galileo.khem.gov.hu/showbinary.php?did=169
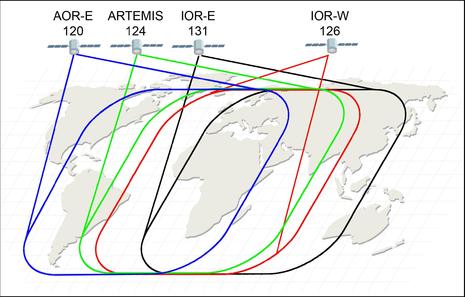
Három szegmensről beszélhetünk ennél a rendszernél is. Vegyük górcső alá először az űrszegmenst, amely három geostacionárius műholdból áll. Egész pontosan négyből, ha ide számítjuk a tesztsugárzás céljából felbocsájtott holdat is. Az első az Inmarsat 3–F1-es (PRN126/IOR–W) műhold volt, mely az Indiai-óceán felett üzemel, a keleti hosszúság 64,01° fölött. Ez volt a teszt hold. A második a sorban az Inmarsat 3–F2-es (PRN120/AOR–E) szatellit, amely az atlanti-óceán felett kering a nyugati hosszúság 15,5°-a felett. A harmadik az Inmarsat 3–F5 (PRN131/IOR–E), amit a keleti hosszúság 25° feletti pályára állítottak. Végül az utolsót, az Artemist (PRN124), 2001. július 12-én indították majd a keleti hosszúság 21,5°-a felett kapott helyet.
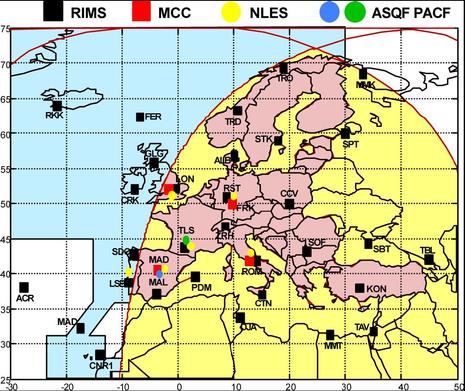
A földi szegmens harmincnégy követőállomásból (RIMS), négy feldolgozóközpontból (MCC), hat betöltőállomásból (NLES) és az ezek közötti kommunikációs hálózatból áll (ASQF – PACF). A harmadik vagyis felhasználói szegmenst a különböző navigációs területeken alkalmazott vevőberendezések alkotják.
Az ábra jól mutatja, hogy az EGNOS holdjai tulajdon képpen csak a Csendes-óceánt nem fedik le.
Soron következő kiegészítő rendszerünk Japánhoz kapcsolódik, ez pedig nem más mint a QZSS.

A japán kormányzat már jó néhány éve tervez saját műholdas navigációs rendszert, de végül is csak 2006. március 31-én adott ki közleményt a Quasi-Zenith Satellite System (QZSS) megvalósításáról, amelyet három lépcsőben kívánnak elérni. A fejlesztés irányítója a JAXA (Japan Aerospace Exploration Agency – Japán Légtér és Világűr Kutató Ügynökség). Az első lépcső a QZS–1 műhold fellövése volt 2006 novemberében. A második lépcső a maradék két műhold pályára állítása – mivel három műholddal fog üzemelni a rendszer – a harmadik pedig az éles tesztfázis és operációs státusz elérése. Ez a rendszer nem egy hagyományos SBAS rendszer, ugyanis holdjai nem egyszerű geoszinkron holdak lesznek. Pályájuk 45°-os inklinációjú elliptikus pálya, excentricitásuk (az ellipszis pálya lapultságát fejezi ki) 0,099, ez okozza a torzított 8-as alakot (
http://www.jaxa.jp/article/interview/vol41/photo_04_e.html). Ugyanakkor ezek a tulajdonságok teszik lehetővé, hogy majdnem mindig lesz egy zenithez közel lévő hold Japán felett. Erről a jellemzőjéről kapta a nevét. Azért terveztek belőlük hármat, hogy a pályájukból adódóan nyolcóránként válthassák egymást. Így valósul meg a 24 órás lefedettség. Kelet-Ázsia és Óceánia területét fogják besugározni, természetesen Japánnal a terület közepén.
A
kép forrása:
http://commons.wikimedia.org/wiki/File:Qzss-45-0.09.jpg
A rendszer célja a Navstar kiegészítése, és a mérési pontosság egyméteresre javítása. Esetünkben nem csak a mérési pontosság javítása a cél, hanem az állandó rendelkezésre állás is. Ugyanis a Japán metropoliszokra jellemző a sok felhőkarcoló, így a vevők csak körülbelül 50%-os vételi idővel rendelkeznek. Tehát nem látnak a nap minden percében kellő mennyiségű Navstar-holdat. A QZSS operációs státuszának elérésével a rendelkezésre állási idő várhatóan 95%-osra fog javulni. A rendszer holdjai a Navstar-ral megegyező L1–C/A, L1C, L2C és L5-ös jeleket fognak sugározni. Ezeken felül még LEX (1278,75 MHz) jelet is sugároznak, mely a Galileo E6-os sávjával van átfedésben. A jelsugárzásnál kell említést tegyek a földi szegmenssel való kommunikációt szolgáló sávokról. Ezek az S (fel: 2025–2110 MHz, le: 2200–2290 MHz), a C (fel: 5000–5010 MHz, le: 5010–5030 MHz), valamint a TWSTFT sávok. Utóbbi a kétutas idő és frekvencia átvitelre szolgál (fel: 14,43453 GHz le: 12,30669 GHz).
Az űrszegmens az imént tisztázásra került, úgyhogy most lássuk a földi szegmenst. A QZSS megfigyelő hálózata négy belföldi és öt külföldi állomásból áll majd. Az előbbiek közé tartozik egy-egy állomás Hokkaidón, Koganein, Ogasavarán és Okinaván. Az utóbbiak pedig Bangalore-ban (India), Hawaii-on (USA), Guamon, Bangkokban (Thaiföld) és Canberrában (Ausztrália) kapnak helyet. A differenciál mérés folyamata megegyezik a WAAS-nál vázoltakkal eltérés csak annyiban van, hogy ennél a rendszernél vannak lézeres távmerő állomások is.
Felhasználói szegmense nem rejt újdonságokat számunkra, talán csak annyiban, hogy Japán technológiai fejlettsége miatt terület arányosan több felhasználója van a GNSS-nek mint Európában.
A soron következő két rendszert India jegyzi. A fellelhető adatok éppen annyira felületesek, mint a Compass esetében. A két rendszer közül az első a GAGAN.
A GAGAN (GPS And Geo Augmented Navigation) India SBAS rendszere. Működési elve és célja megegyezik a többi rendszerével. Üzemeltetését közösen végzi az ISRO (Indian Space Research Organization) és az AAI (Airports Authority of India).
Űrszegmensében geoszinkron holdak kapnak majd helyet. Földi szegmensét nyolc indiai referenciaállomás (INRESS – Indian Reference Stations), egy indiai vezérlőközpont (INMCC – Indian Master Control Center) és egy indiai betöltőállomás (INLUS – Indian Land Uplink Center) alkotja. L1-es és L5-ös frekvencia sávban fog jeleket sugározni, vagyis kompatibilis az eddigi rendszerek vevőivel. Felhasználói szegmense megfelel a már korábban felsoroltaknak. A GAGAN várhatóan 2011 májusára lesz teljesen működőképes, bár ezt a dátumot a globális gazdasági válság minden bizonnyal kitolja majd.
India második rendszere a IRNSS, az Indian Regional Navigation Satellite System vagyis az Indiai Regionális Műholdas Navigációs Rendszer rövidítése. Az indiai kormányzat 2006 májusában hagyta jóvá a rendszer fejlesztését, és az üzemeltetést az ISRO-ra vagyis az Indiai Űrkutató Szervezetre bízta.
Az IRNSS várhatóan 2012-re éri el a minimális működés feltételeit. A tervek szerint, összesen hét műholddal fog üzemelni, melyek geoszinkron pályán kapnak helyet. Az első műholdat várhatóan 2009-ben indítják saját fejlesztésű rakétával. A holdak L5-ös frekvencián fogják sugározni a jeleiket. Ugyan nem tervezik globálissá fejleszteni, de ha igény mutatkozik rá, akkor a már meglévő GPS rendszerekhez hasonlóan 24 – nagyjából 20000 km magasan keringő – holddal elérhetik ezt a célt is.
A sorban az utolsó kiegészítő rendszer a DORIS, mely Franciaországhoz kapcsolódik, ám ennek a rendszernek csak mellékes célja a navigáció segítése.
A Doppler-elv segítségével működik. Nevét is innen kapta: Doppler Orbitography and Radiopositioning Integrated by Satellite. A rendszer 1990-től üzemel a CNES irányítása alatt. A CNES nem más, mint a Centre National d'Etudes Spatiales vagyis a Francia Űrügynökség.
A DORIS holdak két frekvencián kommunikálnak: 2036,25 MHz-en és 401,25 MHz-en. Ebből következik, hogy csak az erre alkalmas vevőkkel lehet venni a jeleiket. A műholdak alacsony földkörüli pályán keringenek. A DORIS jelenleg öt szatellittel üzemel melyek mindegyike képes a pozíció korrekciós jelek sugárzására. Ezek a SPOT–4, a Jason–1, az Envisat, a SPOT–5 és a Jason–2. Ezzel be is mutattam az űrszegmens tagjait.
A követő állomások sugározzák a holdak számára a pontos pozíció adatokat, a hold elvégzi a frekvencia átalakítást, és a nagyobbik hullámsávon sugározza a föld felé a pontos pozícióját. Az imént említett követőállomásokból – amik a földi szegmenst alkotják – ötvenhét üzemel a világ számos pontján. Három irányító központ van: Toulouse-ban, Kourou-ban és Harthebeesthoek-ban. Felhasználói szegmense meglehetősen szűk körű, mivel csak speciális vevővel lehetséges a jelvétel. Elnézve a hullámsávok egységesítési folyamatát, nem volna meglepő, ha rövidesen napvilágot látna a DORIS hullámsávjainak átalakításáról szóló francia határozat.
Összességében belátható, hogy a pár éven belül megvalósuló GNSS fejlesztéseknek köszönhetően a jelenlegi 5–10 méteres horizontális pontosság a hobbiműszer kategóriában is le fog csökkenni 1 méter körülire vagy az alá. Ehhez pedig csak egyetlen egyszerű vevőre lesz szükségünk. Valamint a műholdak számának gyarapodásával mind a turisták a sűrű erdőben, mind az autósok a metropoliszok felhőkarcolóinak tövében, a nap 24 órájában elegendő műhold jelét tudják venni a pontos navigációhoz.
 A WAAS az Egyesült Államok területén valamint Kanada felett működik. Feladata, hogy a Navstar rendszer 10–20 méteres horizontális pontosságát feljavítsa 1,5–2 méteresre. Ennek a pontosításnak leginkább a precíziós navigáció terén van jelentősége, mint például a légi közlekedésben. A rendszert az USA Közlekedési Minisztériuma és a Védelmi Minisztériuma közösen üzemelteti.
A WAAS az Egyesült Államok területén valamint Kanada felett működik. Feladata, hogy a Navstar rendszer 10–20 méteres horizontális pontosságát feljavítsa 1,5–2 méteresre. Ennek a pontosításnak leginkább a precíziós navigáció terén van jelentősége, mint például a légi közlekedésben. A rendszert az USA Közlekedési Minisztériuma és a Védelmi Minisztériuma közösen üzemelteti.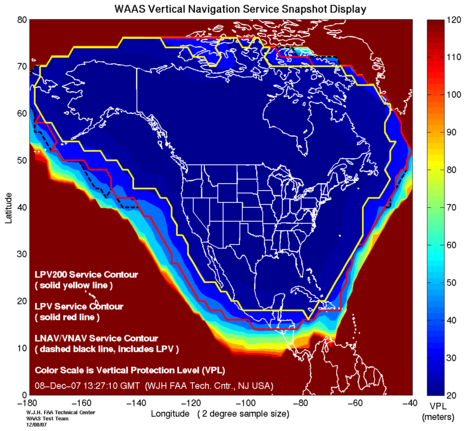
{kind=link}