Legfrissebb híreink
- Gigabites jövő vidéken: több mint 100 településen fejleszt hálózatot a TARR
- A Sony Camera Verify mostantól a videók hitelességét is garantálja
- Innováció a felhőben: rangos díjat nyert a QNAP egységes mentési platformja
- Galaxy S26 Ultra: A profi videók új dimenziója
- Okosóra a pihentető alvásért: új technológia segíthet felismerni az alvási apnoét
Globális műholdas helymeghatározás alapjai
 A GPS rendszer alapvető jellemzői
A GPS rendszer alapvető jellemzőiAz első műhold fellövésére 1978-ban került sor, a rendszer szolgáltatásai hivatalosan 1995-ben indultak meg. A GPS rendszer a felhasználó helyzetét távolságmérés alapján határozza meg. A működés alapfeltétele az idő igen pontos mérése és a Föld körüli pályán keringő műholdak helyzetének pontos ismerete. A technikai és technológia fejlődése éppen a múlt század 80-as, 90-es éveiben tette lehetővé, hogy e két feltételt egyszerre teljesíteni lehessen.
A rendszer
legfontosabb jellemzőit az
alábbiakban foglalhatjuk össze:
- A GPS rendszerben ismert helyzetű Föld körüli pályákon keringő műholdak jeleket sugároznak a Föld felszíne felé. A földi vevőkészülék ezeknek a jeleknek a mérési adataiból, illetve az általuk szállított információk feldolgozásából meghatározza a saját helyzetét. A rendszer tehát aktív műholdakkal és passzív földi vevőkészülékkel működik.
- A GPS rendszer működéséhez feltétlenül szükséges az, hogy a vevőkészülék antennája és a műholdak között ne legyen akadály, ez azt jelenti, hogy beltéri helymeghatározásra a GPS rendszer nem alkalmas.
- A GPS rendszer működésének alapfeltétele az időmérés pontossága. Minden műholdon igen pontos cézium és rubídium atomórák találhatók, melyek abszolút pontossága eléri a 10-13-10-14 értéket. Ez azt jelenti, hogy egy ilyen pontosságú óra kb. 300.000 – 3.000.000 év alatt késik vagy siet egyetlen másodpercet.
A GPS rendszer három alapvető alrendszerből épül fel:
- az űrszegmensből (műholdak)
- a felhasználói rendszerből (vevőkészülékek és szolgáltatások) és
- a vezérlőrendszerből (földi vezérlő- és monitorállomások).
Az űrszegmens teljes kiépítésben 24 műholdat tartalmaz. A 18 működő műhold hat azonos alakú pályán kering: a szomszédos pályasíkok metszésvonalai az egyenlítő síkjával azonos (60°-os) szögeket zárnak be, az azonos pályán haladó 3 műhold egymástól 120°-os szögtávolságban kering, a 2 szomszédos pályán a megfelelő műholdak 40°-ot ,,sietnek” illetve ,,késnek”. A szimmetrikus elrendezés révén biztosított, hogy a földfelszín bármely pontján bármely időpontban legalább négy műhold van észlelésre alkalmas helyzetben, azaz legalább 15°-kal a horizont felett. A műholdak keringési ideje 12 óra, a közepes pályasugár ebből adódóan kb. 20000 km.
A műholdak felszerelése: adó-vevő rádiócsatorna, fedélzeti számítógép jelentős háttértároló kapacitással, két független frekvenciaetalon (atomóra), oszcillátor és frekvenciasokszorozó a vivőjelek előállításához. Egy-egy műhold tömege megközelítőleg 850 kg, energiaforrása napelem. Az üzenet finomabb részletei (amelyek a pontos navigációhoz szükségesek) gyakorlatilag megfejthetetlen módon kódoltak. Ez a kód (P= precise= szabatos) titkos.
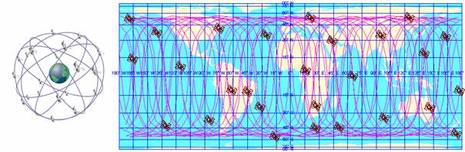
GPS műholdak elhelyezkedése
A műholdak számát és elrendezését úgy választották meg, hogy minél nagyobb legyen annak az esélye, hogy a Föld felszínén egy adott helyen legalább négy műholdat lehessen "látni" a vevőkészülék antennájával.
Annak az esélye, hogy egy felhasználó négynél kevesebb műholdat lát egy adott helyen egy adott időben kb. 0,01%, azaz ilyen eset minden 10.000-dik felhasználóval fordul csak elő, de néhány perces várakozás után ezek a felhasználók is képesek legalább négy műholdjelet venni.
 A GPS
rendszer működését a földi vezérlőrendszer irányítja. A vezérlőrendszer három
alapelemből áll: egy központi vezérlő állomásból, monitorállomásokból, földi
antennákból.
A GPS
rendszer működését a földi vezérlőrendszer irányítja. A vezérlőrendszer három
alapelemből áll: egy központi vezérlő állomásból, monitorállomásokból, földi
antennákból.
- a műholdak működésének folyamatos figyelése, az egyes egységek állapotának ellenőrzése;
- a műholdak pályaadatainak folyamatos mérése, a műholdon tárolt adatok frissítése;
- a műhold fedélzeti óráinak szinkronizálása, a pontos idő beállítása;
- a műholdon tárolt navigációs üzenettár frissítése, a helymeghatározáshoz szükséges korrekciós adatok (időjárási adatok, a légkör és az ionoszféra állapotjellemzői) gyűjtése és továbbítása a műholdak felé.
Kapcsolódó cikkek: